esp32-驱动步进电机
[toc]
步进电机
所使用的步进电机和驱动器如下:

驱动器的引脚
| 引脚名称 | 引脚定义 |
|---|---|
| ENA-(ENA) | 输出使能负端 |
| ENA+(ENA) | 输出使能正端 |
| DIR-(DIR) | 方向控制负端 |
| DIR+(DIR) | 方向控制正端 |
| PUL-(PUL) | 脉冲控制负端 |
| PUL+(PUL) | 脉冲控制正端 |
| B- | B相正 |
| B+ | B相负 |
| A+ | A相正 |
| A- | A相负 |
| GND | 电源地 |
| VCC | 电源正 |
- EAN:控制输出信号是否使能,当EAN有效时,输出关闭,电机绕组电流为零, 电机为无力矩状态,可以自由转动电机,适合需要手动调整电机的场合。
- DIR:控制电机的转动方向,当此信号有效时,电机顺时针转动,当此信号无效时,电机逆时针旋转。
- PUL:控制电机转动,驱动器接收到的脉冲信号电机就会按照既定的方向旋转。电机的角位移与脉冲的数量成正比, 速度与脉冲的频率成正比。通常脉冲的有效宽度>=5us,频率<=125KHz。
控制器的有两组拨码开关,用于控住细分和电流:
- 细分设置:步进电机的步进角都是1.8°, 因此电机旋转一圈需要360° /1.8° =200个脉冲,若细分选择16,则表示不仅电机转一圈需要200*16=3200个脉冲;
- 电流设置:电流值需要根据步进电机的额定电流来设定。 一般建议驱动器的输出电流设定和电机额定电流差不多或者小一点;
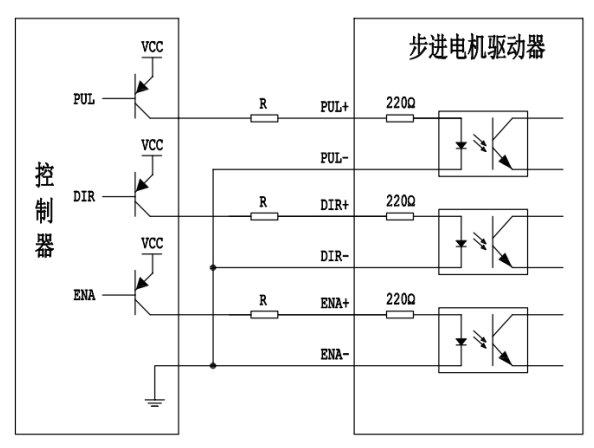
驱动器的接线方式一般分为共阴极和供阳极两种:
共阴极接法如图所示:
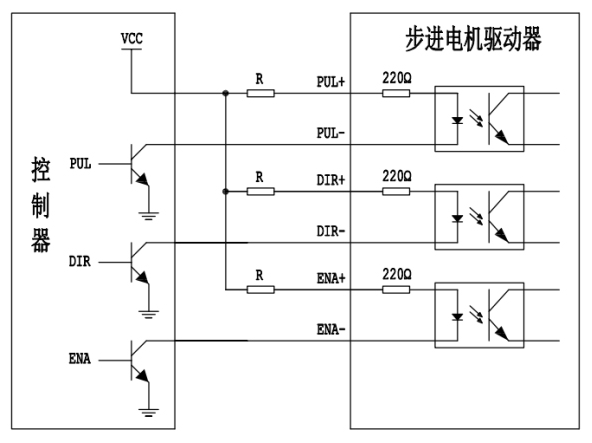
共阳极接法如图所示:
控制方法
通过对步进电机的驱动器了解,可知控制步进电机需要使用3个GPIO:
- 使能端:一个普通的GPIO,能输出高低电平;
- 方向端:一个普通的GPIO,能输出高低电平;
- 脉冲端:能够输出脉冲数可控的GPIO;
ESP32有PWM的输出外设,但是没有发现能控制脉冲个数的方式(可能是我对该外设了解不清楚),因此采用定时器+GPIO的方式,使其能输出可控的脉冲
ESP32S3 定时器外设
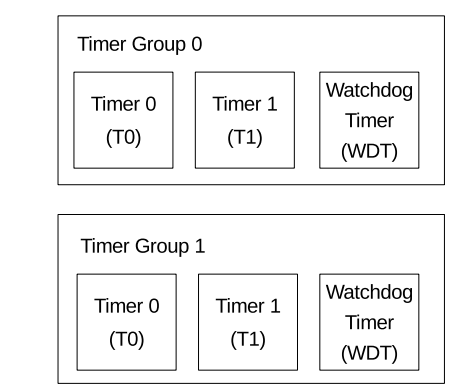
ESP32-S3 包含两个定时器组,即定时器组 0 和定时器组 1
定时器具有如下功能:
- 16 位时钟预分频器,分频系数为 2 到 65536
- 54 位时基计数器可配置成递增或递减
- 可读取时基计数器的实时值
- 暂停和恢复时基计数器
- 可配置的报警产生机制
- 计数器值重新加载(报警时自动重新加载或软件控制的即时重新加载)
- 电平触发中断
定时器的架构如下:
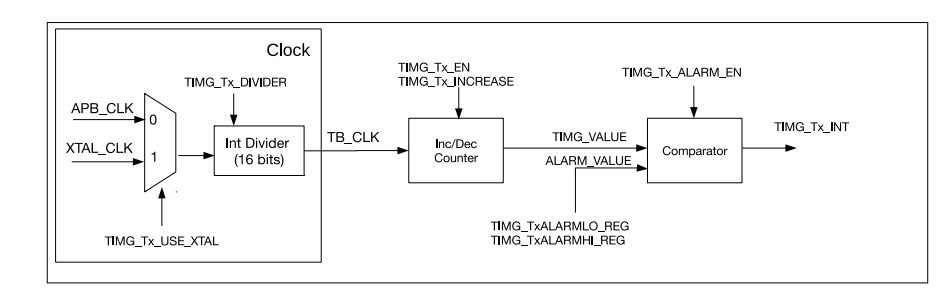
-
时钟源的选择,可以选择APB时钟源(APB_CLK)或者外部时钟(XTAL_CLK ),时钟源16 位预分频器分频,产生时基计数器使用的时基计数器时钟TB_CLK。
-
54 位时基计数器:54 位时基计数器基于 TB_CLK,每经过TB_CLK,技计数值递增或者递减。其中,时钟使能(TIMG_Tx_EN 能控制计数器的是否停止;
-
比较器:当当计数值和设定的报警值一致时,触发定时器中断;
定时器的配置
当然,esp32是不需要我们操作寄存器的,只需要按照官方说明进行配置即可
1 资源分配
配置结构体:gptimer_config_t
成员:
clk_src:选择定时器的时钟源direction:设置定时器的计数方向resolution_hz设置内部计数器的分辨率intr_priority设置中断的优先级。如果设置为0,则会分配一个默认优先级的中断,否则会使用指定的优先级。flagsintr_sharedbackup_before_sleep
配置结构体传递给gptimer_new_timer()
/*创建定时器*/
gptimer_handle_t gptimer = NULL;
/*定时器计数周期1us*/
gptimer_config_t timer_config = {
.clk_src = GPTIMER_CLK_SRC_DEFAULT, // APB时钟源
.direction = GPTIMER_COUNT_UP, // 向上计数
.resolution_hz = 1 * 1000 * 1000, // 计数分辨率(1MHz)
.intr_priority = 0, // 中断优先级:默认
};
gptimer_new_timer(&timer_config, &gptimer);
2 设置报警动作
配置结构体 gptimer_alarm_config_t
成员
alarm_count:设置触发警报事件的目标计数值reload_count代表警报事件发生时要重载的计数值flags.auto_reload_on_alarm标志设置是否使能自动重载功能
配置结构体传递给gptimer_set_alarm_action()
/*设置周期性动作*/
gptimer_alarm_config_t alarm_config = {
.alarm_count = 50, // 事件周期50us
.reload_count = 0, // 重新加载的计数值为0
.flags.auto_reload_on_alarm = true // 自动重载
};
gptimer_set_alarm_action(gptimer, &alarm_config);
设置为周期性动作,定时周期为50us。
3. 注册事件回调函数
通过gptimer_register_event_callbacks()将函数挂载到中断服务例程 (ISR)。请在 gptimer_enable() 之前调用这一函数
/*设置周期性回调函数*/
gptimer_event_callbacks_t cbs = {
.on_alarm = generate_pluse_motor_cb
};
gptimer_register_event_callbacks(gptimer, &cbs, &expected_value);
回调函数
/**
* @brief 定时器周期事件回调函数
* @details 使用GPIO4产生脉冲信号
* @param timer: 定时器句柄
* @param edata: 事件数据
* @param user_data: 用户数据
* @return 无
*/
static bool generate_pluse_motor_cb(gptimer_handle_t timer, const gptimer_alarm_event_data_t *edata, void *user_data)
{
uint16_t exp_pluse = *(uint32_t *)(user_data);
static uint16_t count;
count++;
if(count > 2*exp_pluse)
{
count = 0;
gptimer_stop(timer);
}
else{
gpio_set_level(PLUSE_GPIO, count % 2);
}
return true;
}
回调函数中,则是每次进入定时器中断就翻转电平,即脉冲的周期为50us*2=100us,另外通过user_data将期望的脉冲数带入回调函数,一旦达到期望脉冲数则停止定时器,实现脉冲数可控的目标。
4 使能和禁用定时器
/*使能定时器*/
gptimer_enable(gptimer);
5 启动或者停止定时器
/*启动定时器*/
// gptimer_start(gptimer);
GPIO 配置
#define PLUSE_GPIO GPIO_NUM_4 // 步进电机脉冲
#define DIR_GPIO GPIO_NUM_5 // 步进电机方向
#define ENABLE_GPIO GPIO_NUM_48 // 步进电机使能
/*配置GPIO: 配置为输出*/
gpio_config_t io_conf = {
.intr_type = GPIO_INTR_DISABLE, // 初始电平
.mode = GPIO_MODE_OUTPUT, // 输出模式
.pin_bit_mask = (1ULL << PLUSE_GPIO | 1ULL << DIR_GPIO | 1ULL << ENABLE_GPIO),
.pull_down_en = GPIO_PULLDOWN_DISABLE, // 禁止下拉
.pull_up_en = GPIO_PULLUP_DISABLE // 禁止上拉
};
gpio_config(&io_conf);
设置脉冲数和方向
/**
* @brief 设置脉冲数和转动方向
* @param timer: 定时器句柄
* @param *exp_pluse: 期望的脉冲数(和set_pluse一致,它将传入定时器的回调函数中)
* @param set_pluse:设置的脉冲数
* @param dir:控制方向
*/
bool set_pluse_count(gptimer_handle_t timer, uint32_t *exp_pluse, uint32_t set_pluse, int8_t dir)
{
esp_err_t st;
st = gptimer_start(timer);
if(st == ESP_OK)
{
*exp_pluse = set_pluse;
gpio_set_level(DIR_GPIO, dir);
ESP_LOGI(TAG, "pluse=%ld, dir=%d", set_pluse, dir);
}
else{
ESP_LOGE(TAG, "gptimer_start failed with %s", esp_err_to_name(st));
}
return st;
}
调用:
while (1)
{
set_pluse_count(gptimer, &expected_value, 1600, 1);
vTaskDelay(5000 / portTICK_PERIOD_MS);
set_pluse_count(gptimer, &expected_value, 1600, 0);
vTaskDelay(5000 / portTICK_PERIOD_MS);
}
完整代码
git clone -b motor https://github.com/navy-to-haijun/esp32-s3.git